

【科普】高精度地图:智能驾驶的 “超级导航仪”
在智能驾驶向自主进化的路上,感知是“眼”、决策是“脑”,高精度地图则是核心支撑的“超级导航仪”。它以厘米级精度与超视距感知,成为恶劣天气、复杂路况下的安全底气,重塑未来出行格局。
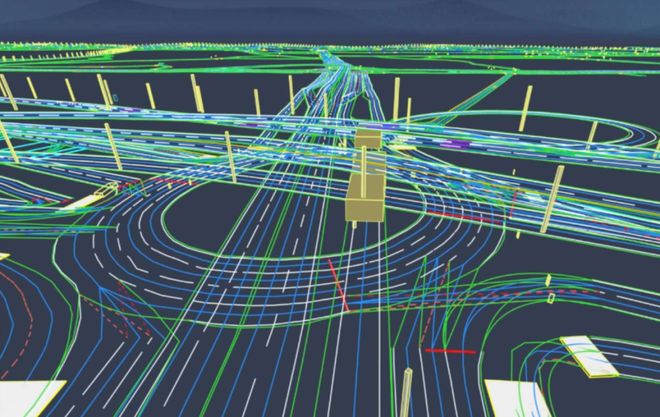
高精度地图是智能驾驶的核心装备,核心具备“两高一多”特性:厘米级高精度,远超普通导航地图的米级精度;数据实时更新的高动态,可灵活应对各类突发状况;维度丰富的多维度,不仅包含车道模型、道路部件等详细信息,还涵盖GPS信号消失区域、道路施工状态等安全相关属性。
它由定位模块、数据采集与处理系统、更新系统构成,既包含道路走向、红绿灯等基础信息,更标注海量环境细节。它弥补了单车传感器“可见即可得”的局限,提供超视距感知,是L3以上自动驾驶的必备“天眼”。
与传统导航地图不同,高精度地图的使用者是计算机,属于车载安全系统,专注于高精度定位、辅助环境感知与决策,而非单纯的导航搜索。
增加车道属性相关数据以及高架物体、防护栏树道路边缘类型、路边地标等大量目标数据
永久静态数据(更新频率约1个月),半永久静态数据(更新频率约1小时),半动态数据(频率约1分钟),动态数据(频率约1秒)
“地图匹配+辅助环境感知+路径规划”:通过“高精度+高动态+多维度”的地图数据为智能驾驶提供自变量和目标函数
高精度地图是智能驾驶的核心支撑,贯穿全场景出行,主要落地于三大核心场景:
(1)环境感知辅助:突破传感器物理与气候局限,实现超视距感知,提前推送前方道路、交通信息;在雨雾、沙尘等恶劣天气,或大车遮挡、标志模糊时补充环境数据,还能通过先验信息缩小传感器检测范围、节约计算资源,同时提供冗余数据,校验传感器可信度。
(2)路径规划与决策:提前预知限速、人行横道、施工区域等信息,助力系统提前调整车速、规划最优路线,结合实时路况动态更新路径,提升通行效率与安全性。
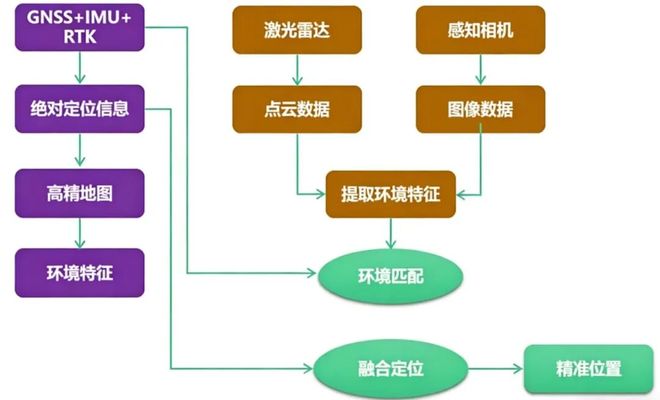
(3)高精度定位辅助:凭借三维结构化路网数据,与车载 GPS/IMU、激光雷达等采集的环境信息匹配,精准定位车辆车道级位置,可解决单一定位源局限,还能在卫星遮挡、特征重复场景下纠偏传感器误差,保障全场景定位可靠。
从高速领航辅助、城市道路自主行驶,到自动泊车、紧急避险与多车协同驾驶,高精度地图都发挥着不可或缺的支撑作用。
随着智能驾驶向 L4/L5 级进阶,高精度地图正朝着“高精化、实时化、轻量化、低成本化”方向进化。通过“专业采集+众包更新”模式提升数据更新效率,融合AI算法实现数据全流程自动化处理,与多传感器深度协同形成“感知-地图-决策”闭环,轻量化优化则推动其向经济型家用车普及。未来,其精度与覆盖范围将持续提升,应用场景拓展至更多领域;数据更新管理更高效,实现动态适配;同时强化隐私与网络安全防护。此外,还将深度融合车路协同、数字孪生与 V2X 技术,进化为 “动态预测” 模式,构建一体化数字交通生态,为智能驾驶规模化落地筑牢基础[5]。
高精度地图是智能驾驶进阶的关键,未来将更深度协同各类技术,让智能驾驶“看得清、想得远、走得稳”,解锁更安全便捷的出行体验。